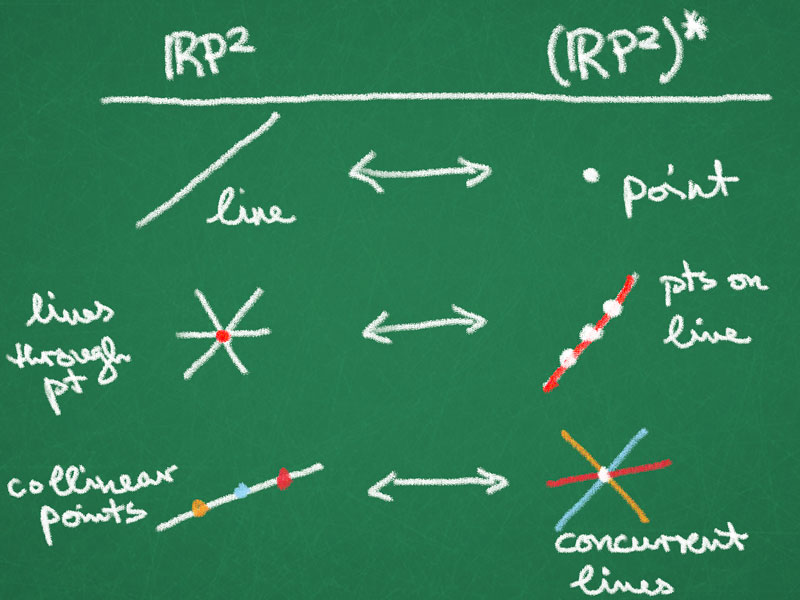
Cross-ratio of lines through a point (again).
![]()
Claim. The map which maps a point $g^{\ast} \in p^{\ast}$ to the intersection point of $g \cap \ell$ is a projective map. Continue reading
Cross-ratio of lines through a point (again).
![]()
Claim. The map which maps a point $g^{\ast} \in p^{\ast}$ to the intersection point of $g \cap \ell$ is a projective map. Continue reading
We had some server problems and are working on it. Sorry for the inconvenience.
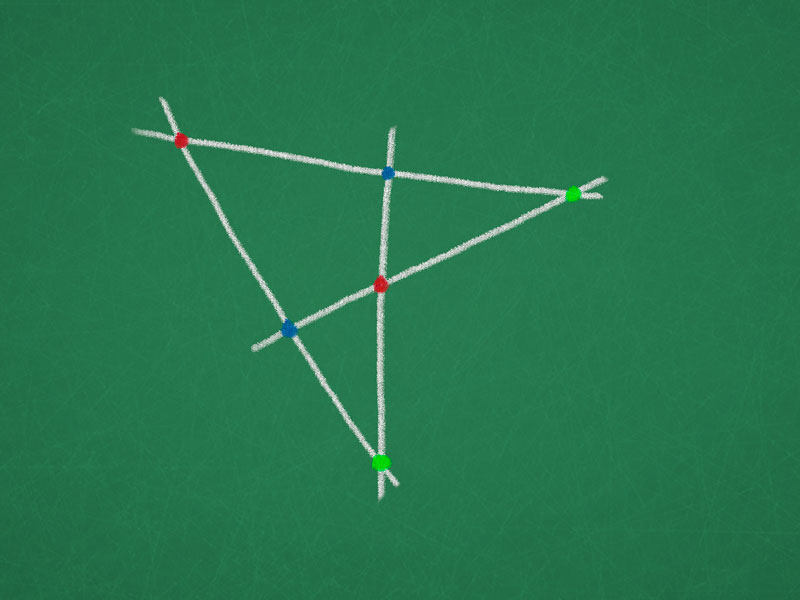
Definition (complete quadrilateral). A configuration consisting of four lines in the projective plane – no three through one point – and the six intersection points, one for each pair of lines, form a complete quadrilateral.
Sorry for the inconvenience today. The other dates that we have to leave the regular room are:
Monday 10.12. MA 649
Thursday 13.12. MA 650
A pdf version of the notes is maintained by Che Netzer and available for download on his website.
Let $V$, $W$ be two vectorspaces over the same field and of the same dimension and $F\colon V \rightarrow W$ a linear isomorphism. In particular $ker(F) = \{0\}$, so F maps 1-dimensional subspaces to 1-dimensional subspaces.
Hence $F$ induces a map from $P(V)$ to $P(W)$.
Definition: A projective transformation $f$ from $P(V)$ to $P(W)$ is a map defined by a linear isomorphism $F\colon V \rightarrow W$ such that
\begin{equation*}
f([v]) = [F(v)] \quad \forall [v] \in P(V)\,.
\end{equation*} Continue reading
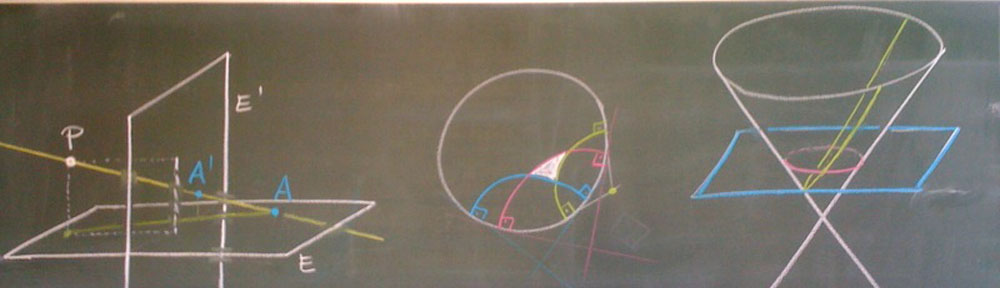
I put the configurations I showed on the projector online:
You may move the points around to see how the configuration changes.

Question. What happens if the points $A$, $B$, $B’$, and $C’$ are not in general position? Post your pictures.


Question. The above picture only show an affine part of the respective projective spaces. What happens if some of the points lie at infinity?